Ésta es la segunda parte de nuestra disección de la sonda Phoenix. En la primera parte analizamos los sistemas no científicos de la sonda, como la propulsión, las fuentes de energía o las comunicaciones. Hoy nos dedicaremos a escudriñar los instrumentos científicos de la Phoenix, de modo que cuando aparezcan en las noticias todos sepamos de qué demonios se está hablando. De hecho, ya hay alguna noticia –no tremendamente jugosa, pero bueno– que menciona instrumentos de los que vamos a hablar hoy mismo.
Para que te sirva de referencia según vas leyendo, aquí tienes una imagen en la que hemos marcado los distintos instrumentos de los que vamos a hablar (en la página de la NASA sólo he encontrado la imagen con etiquetas en inglés, de modo que la hemos traducido). Incluso puedes bajarte la versión a alta resolución para usarla de fondo de pantalla (El Tamiz no se hace responsable de las reacciones que esto pueda producir en tus compañeros de trabajo o estudios):

Versión a 1800x1450 px. Crédito: NASA/JPL/University of Arizona/El Tamiz.
{kind=link}
Hay unos cuantos vídeos en formato .mov y .mp4 a lo largo del artículo. Aunque puedes verlos aquí mismo, he incluido un enlace justo debajo de cada uno para poder descargarlos directamente, para aquellos de vosotros que tenéis problemas para verlos en el navegador o simplemente queréis guardarlos.
Cámara de descenso
No voy a dedicar mucho espacio al primer instrumento del que vamos a hablar porque, desgraciadamente, no va a ser utilizado en la misión y se encuentra desactivado. Se trata del Mars Descent Imager (MARDI), una pequeña cámara con micrófono situada en la parte inferior de Phoenix. Es la cámara más ligera y eficaz energéticamente (funciona con tan sólo 3 vatios de potencia) que ha llegado a Marte.
El plan era activar el MARDI cuando Phoenix se encontrase a unos 8 km de altitud sobre la superficie marciana, de modo que pudiéramos ver con bastante detalle los últimos minutos del descenso, además de la zona de amartizaje; también hubiéramos podido escuchar los sonidos reales durante el final del descenso. ¿Te imaginas haber podido oír el sonido del viento marciano?

Crédito: NASA/JPL/MLSS.
Por desgracia, se descubrió un problema antes del lanzamiento: la tarjeta de interfaz que transmitía los datos de este dispositivo y otros más importantes, como las mediciones de los acelerómetros, tenía un fallo. Si se hubieran estado transmitiendo datos de otros aparatos cuando el MARDI tomase imágenes, existía el peligro de que unos datos corrompiesen otros. Puesto que los medidores inerciales eran los responsables de que Phoenix llegase a la superficie de una pieza, se decidió desactivar MARDI por si las moscas.
Si se hubiera descubierto antes, hubiera sido posible reemplazar la tarjeta por otra diferente, pero todo sucedió en pruebas relativamente cercanas al lanzamiento y, de hecho, ni siquiera se ha retirado esta pequeña cámara de la sonda: está ahí, pero desactivada. Una verdadera lástima.
Cámara estereoscópica de superficie
La cámara estereoscópica de superficie (Surface Stereo Imager, SSI) es básicamente “los ojos” de la Phoenix. Se encuentra en lo alto de un mástil de unos 2 metros de altura, y tiene dos cámaras que le permiten, como su propio nombre indica, una visión estereoscópica como la de la visión humana, pues la distancia entre ambas cámaras es aproximadamente la que hay entre nuestros ojos. Es capaz de producir imágenes de hasta 1024x1024 píxeles, y utilizando distintos filtros puede obtener imágenes en doce longitudes de onda diferentes en el visible e infrarrojo.

Crédito: NASA/JPL/University of Arizona.
En primer lugar, la SSI permite realizar fotografías panorámicas del entorno de la sonda, lo que nos permite ver el paisaje que rodea a la Phoenix en imágenes de 360°, como la siguiente a dos niveles:

[Versión a 6659x1818 px](http://upload.wikimedia.org/wikipedia/commons/1/17/PIA10735_Phoenix_B%26W_panorama.jpg “”). Crédito: NASA/Jet Propulsion Laboratory-Caltech/University of Arizona/Texas A&M; University.
Aquí tienes un vídeo en el que se simula, a partir de estas imágenes, cómo la cámara mira alrededor de la sonda:
[quicktime]http://www.nasa.gov/mp4/233156main_10761.mp4[/quicktime]
Descarga del vídeo. Crédito: NASA/JPL-Caltech/University of Arizona
En segundo lugar, esta cámara puede mirar hacia el cielo y el Sol: de este modo, analizando la intensidad de las diferentes longitudes de onda que llegan al suelo, podremos conocer mejor la composición de la atmósfera marciana y su comportamiento óptico. Algo parecido puede lograr mirando hacia abajo, hacia la propia sonda: mediremos la cantidad de polvo depositado sobre ella a lo largo del tiempo para saber más sobre los procesos erosivos y atmosféricos.
Finalmente, la cámara está tomando imágenes del suelo alrededor de la Phoenix a distintos niveles, para proporcionar a los científicos una imagen en 3D del entorno de la sonda; esto está sirviendo para dirigir el brazo robótico (cuya única cámara, de la que hablaremos en breve, no permite distinguir profundidad) con gran precisión a los lugares deseados.
Brazo robótico
Phoenix dispone de un largo brazo robótico de titanio y aluminio de unos 2,35 metros de longitud para manipular el terreno a su alrededor y obtener muestras de rocas y también –si la suerte nos acompaña– hielo. Este brazo tiene cuatro grados de libertad, y acaba en una paleta que puede recoger material suelto y excavar hasta medio metro bajo la superficie marciana.
La NASA ha utilizado un diseño muy similar al del brazo robótico de la Mars Polar Lander, que fue probado en el Valle de la Muerte para abrir agujeros en un suelo rocoso similar en textura al de Marte, de modo que no tenían muchas dudas de que este instrumento fuera capaz de excavar en la superficie.

Crédito: NASA/JPL/UA/Lockheed Martin.
La esperanza de los científicos es que no haya que llegar hasta 50 cm de profundidad, sino que antes de eso se encuentre la superficie de hielo que ansían encontrar. Si es así, pensamos que ese hielo va a ser durísimo, y la paleta rascará la superficie para soltar una cantidad razonable, que luego recogerá para examinarla.
Para encontrar el hielo, el área de acción del brazo va a ser fundamentalmente la zona justo al norte de la sonda: la propia Phoenix proporciona sombra allí durante el mediodía, de modo que al exponer el hielo a la luz se minimiza la cantidad que se vaporice debido a la radiación solar.
El brazo robótico dispone de una cámara justo sobre la paleta. Con ella es posible por un lado mirar hacia casi cualquier sitio, como por ejemplo bajo la propia Phoenix:
[quicktime]http://www.nasa.gov/mp4/238811main_12322.mp4[/quicktime] Descarga del vídeo. Crédito: NASA/JPL-Caltech/University of Arizona/Max Planck Institute/SSV .
Por otro lado, la cámara es capaz de enfocar objetos a distancias tan cortas como 11 mm, y obtener imágenes con una resolución máxima de unas 23 micras por píxel, lo cual nos permitirá ver las muestras que coja la Phoenix con una precisión extraordinaria. Su segunda misión es precisamente ésa: comprobar lo que recoge la paleta del brazo y examinar las propiedades ópticas de las muestras y el terreno circundante.

Crédito: NASA/JPL-Caltech/University of Arizona/Max Planck Institute.
Para iluminar el terreno, la cámara dispone de dos lámparas que puedes ver en la foto por encima y por debajo del objetivo. Cada una de estas dos lámparas dispone de luces de color azul, verde y rojo que pueden encenderse por separado para crear imágenes en falso color una vez transferidas a la Tierra. Dispone además de una cubierta móvil que protege la lente del polvo cuando no se está utilizando.

Imagen de la paleta con una muestra de regolito marciano, tomada por la cámara del brazo robótico. Crédito: NASA/JPL-Caltech/University of Arizona/Max Planck Institute.
Laboratorio de Microscopía, Electroquímica y Conductividad
El MECA (Microscopy, Electrochemistry and Conductivity Analyzer) es una especie de mini-laboratorio que realizará muchos tipos distintos de pruebas sobre muestras del suelo marciano. Tiene dos partes, una dentro del chasis de la sonda (con varios componentes distintos) y otra en el brazo robótico.
Uno de los componentes más importantes del MECA es el Laboratorio de Química Húmeda (Wet Chemistry Lab, WCL), que tiene cuatro recipientes cada uno del tamaño de una taza de café. En ellos se depositarán muestras del suelo tomadas con la paleta del brazo robótico: una de la superficie, y otras tres a distintas profundidades. El nombre de este componente se debe a que, para realizar las pruebas pertinentes, se mojarán las muestras del terreno con agua – agua traída desde la Tierra, por supuesto.

Prototipo de uno de los recipientes del WCL. Crédito: NASA/JPL.
Dentro de los recipientes del WCL hay 26 sensores diferentes, que medirán cosas como el pH del suelo, concentraciones de distintos iones, etc. Además, cada recipiente dispone de un pequeño “asistente de laboratorio” robótico que irá añadiendo distintas sustancias (una vez más traídas desde la Tierra) a cada muestra para analizarla más en profundidad, removiéndolas con una especie de cuchara mientras los sensores del recipiente toman sus medidas según se producen las reacciones químicas pertinentes.
Esta parte de la misión es esencial porque las condiciones de acidez y composición química del terreno son fundamentales para estimar las posibilidades –e incluso los indicios– de vida en la superficie, o justo bajo la superficie, del Planeta Rojo. Algunos de los sensores del Laboratorio de Química Húmeda son capaces de detectar, directa o indirectamente, compuestos generalmente asociados con la vida bacteriana que conocemos, de modo que si al final hay alguna noticia revolucionaria de esta misión, tal vez el responsable será este laboratorio.
Pero otro componente del MECA es también de gran importancia: se trata del Laboratorio de Microscopía. El brazo robótico depositará muestras del terreno y (esperemos) del hielo que encuentre en los distintos “platos” del microscopio. Existen 69 platos diferentes, cada uno con un sustrato distinto, en una especie de rueda que presenta el plato deseado al brazo robótico para que éste deje caer la muestra sobre él. Cada uno nos permitirá observar el comportamiento del material ante sustratos imantados, de silicona y de sustancias con distintas texturas y propiedades químicas.
Estos platos serán iluminados con radiación de diferentes longitudes de onda: luz roja, verde, azul y radiación ultravioleta. De este modo podremos también observar sus propiedades ópticas y su reacción a la radiación UV. Mientras, serán observados con dos microscopios diferentes: uno de ellos es un microscopio óptico con una resolución de 4 micras por píxel y el otro es un AFM (Atomic Force Microscope), un tipo de microscopio más moderno derivado del microscopio de efecto túnel. El nombre “microscopio” es algo engañoso porque el AFM no utiliza la luz, sino que “tienta” la superficie midiendo las fuerzas eléctricas a escala atómica, y es capaz de obtener una resolución de unos 10 nanómetros, algo absolutamente inaudito en ningún instrumento antes enviado a Marte.
Finalmente, en los “nudillos” del brazo robótico se encuentra la última parte del MECA: el Sensor de Conductividad Térmica y Eléctrica (Thermal and Electrical Conductivity Probe, TECP), que tiene varios pequeños pinchos con sensores unidos a ellos. El brazo clavará estos pinchos en el suelo a distintas profundidades, y los sensores medirán la conductividad térmica del terreno y su conductividad eléctrica: por ejemplo, una de las agujas se calentará intensa y rápidamente y las otras detectarán el tiempo que tardan en calentarse y cuánto lo hacen, para determinar las propiedades térmicas del terreno. Al lanzar pulsos eléctricos de manera similar se estimará la humedad y salinidad del terreno, etc.
Estación meteorológica
Este conjunto de instrumentos ha sido construido por la Agencia Espacial Canadiense, y está midiendo múltiples variables del tiempo atmosférico marciano con más precisión de lo que nunca lo hemos hecho.
En primer lugar, mide la temperatura y presión atmosféricas continuamente. La estación meteorológica tiene un mástil de 1,2 metros de altura con termómetros a tres alturas diferentes, para medir la variación de temperatura del suelo hacia arriba. En lo alto del mástil hay un anemómetro que nos permite conocer la intensidad y dirección del viento marciano, y que la sonda “mira” con la cámara estereoscópica que hemos mencionado antes.
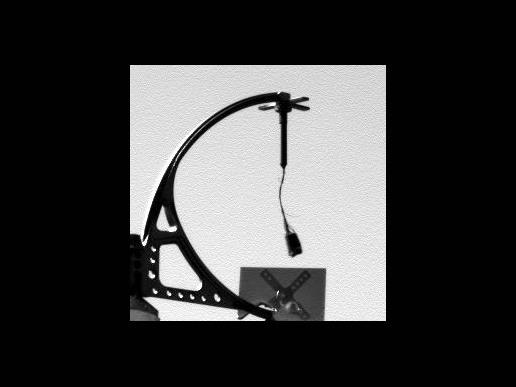
Imagen del anemómetro tomado por la cámara estereoscópica.
Aquí tienes un vídeo que muestra cómo la cámara observa el anemómetro. Sí, lo que ves es la pieza del anemómetro bamboleándose debido al viento marciano, si no te emocionas no tienes sangre en las venas:
[quicktime]http://www.nasa.gov/mov/238806main_7655.mov[/quicktime]
Descarga del vídeo. Crédito: NASA/JPL-Caltech/University of Arizona/Texas A&M; University/SSV .
Además, la estación dispone de un LIDAR (Light Detection and Ranging), un dispositivo parecido al RADAR (Radio Detection and Ranging) pero que emplea luz visible en vez de ondas de radio para determinar la posición y distancia de objetos. El LIDAR de la estación está apuntado directamente hacia arriba: emitirá pulsos de láser verticalmente hacia el cielo y medirá la intensidad que vuelve y el tiempo que tarda en volver mediante un sensor. De este modo podremos conocer la cantidad de partículas de polvo a distintas alturas, la profundidad y densidad de las nubes, etc.
Este vídeo muestra una animación del funcionamiento del LIDAR:
[quicktime]http://www.nasa.gov/mov/233159main_10311.mov[/quicktime]
Descarga del vídeo. Crédito: Koji Kuramura.
Horno vaporizador

Crédito: NASA/JPL/University of Arizona.
El nombre técnico es TEGA (Thermal and Evolved Gas Analyzer), pero este instrumento es básicamente un horno que calienta las muestras de regolito hasta 1000 °C, vaporizando las rocas y luego analizando los gases resultantes. La importancia de este instrumento es la siguiente: una vez vaporizada la muestra, un espectrómetro de masas analiza la composición química del gas con una precisión enorme, tanto que es capaz de detectar concentraciones de moléculas y átomos menores de una parte por cada cien millones. Si existen compuestos orgánicos en esa muestra, el TEGA será capaz de “verlos” aunque haya cantidades minúsculas.

El brazo robótico a punto de depositar una muestra sobre las rendijas del TEGA (abajo a la derecha). Crédito: NASA/JPL-Caltech/University of Arizona/Texas A&M; University.
Además, al ser capaz de detectar las proporciones de diferentes isótopos del hidrógeno, oxígeno, nitrógeno y carbono, será posible conocer el origen de muchas moléculas volátiles y tal vez determinar la posibilidad de que estén asociadas a procesos orgánicos.
Como puedes ver en la imagen de arriba, el TEGA tiene ranuras que conducen a cada uno de los ocho hornos de que dispone (cuatro en cada vertiente del “tejado”). Estas ranuras pueden abrirse o cubrirse con tapas, y disponen de filtros que permiten dejar pasar sólo particulas de pequeño tamaño o más grandes. El brazo robótico ha dejado caer una muestra sobre dos de las ranuras con filtro, pero algo parece haber ido mal: aunque todavía hace falta saber más noticias, los sensores del horno no han detectado la muestra dentro, de modo que o bien los sensores no funcionan bien, o el filtro no ha dejado pasar las partículas como debería. Aquí puedes ver la imagen de la muestra sobre las dos ranuras abiertas:

Crédito: NASA/JPL-Caltech/University of Arizona/Texas A&M; University.
Como puedes ver, a lo largo de los próximos meses vamos a conocer Marte con un detalle y en una profundidad mayores que nunca antes. Es posible que descubramos algo revolucionario, o simplemente que aprendamos más sobre las condiciones del planeta de cara a una posible misión humana en un futuro no demasiado lejano. En cualquier caso, cuando lleguen las noticias correspondientes espero que este artículo de dos entregas te sirva de referencia para saber de qué diablos están hablando.
Eso sí, trata de no pasarte de listo. Comentarios como “¿Han detectado altas concentraciones de carbono-14 en las rocas marcianas? Ah, siempre sospeché que el espectrómetro de masas del TEGA nos proporcionaría momentos de diversión” pueden suponer que recibas una colleja bien merecida.
Para saber más: